
联系方式
- 联系人: 谢德志
- 手机:13826514079
- 电话:0755-27250588
- 地址: 中国 广东 深圳 宝安区 广东省深圳市松岗街道沙埔围第二工业园37栋
- 邮编:518101
产品列表
暂无产品
详情
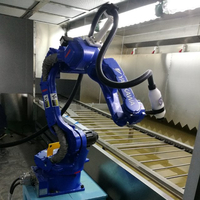
定制自动化喷涂机器人生产流程
创建时间:2018-06-25 17:40
浏览次数:159
近几年随着国内喷涂技术的迅速发展,自动化喷涂机器人得到了广泛的应用,下面我就简单介绍一下喷涂机器人技术的实现方法。
近几年随着国内喷涂技术的迅速发展,自动化喷涂机器人得到了广泛的应用,下面我就简单介绍一下喷涂机器人技术的实现方法。
1、喷涂工件的造型获取:喷涂工件的造型及CAD数据,是喷涂机器人进行离线编程的必要条件。而工件的造型及数据的获取方法是,将工件的设计阶段与加工制造阶段集成起来,从工件设计阶段直接获取其CAD数据,再根据所获取的CAD数据进行路径规划。然后再使用使用三维激光扫描仪进行扫描,获取工件实物表面的数据,形成点云,再通过三维重构,获取工件的CAD实物数据。使用机械式探针沿工件表面滑动,以获得工件表面数据,再对工件表面数据进行B样条拟合,最终重构出工件的三维模型。
2、喷涂路径规划:路径规划是自动化喷涂机器人离线编程的另一项关键技术。因为喷涂机器人路径规划的好坏,直接关系到喷涂作业的效率以及工件表面的涂层是否均匀,对喷涂工件的质量的影响巨大。而自动化喷涂机器人的路径规划设计则需要将获取到的工件CAD数据转换成STL文件,利用快速成形的切片技术将工件的三维模型进行分层,将各层的点数据进行矢量扩展,然后会得到一系列有方向的点系,按照一定的排列顺序形成喷涂机器人的喷涂轨迹。最后再根据喷枪在工件表面的涂层累积速率数学模型,构建工件曲面上任意一点的涂层厚度数学表达式,用于优化的方法,在曲面的函数空间内寻求一条合适路径的函数表达式,由此得出喷涂的轨迹路径。
1、喷涂工件的造型获取:喷涂工件的造型及CAD数据,是喷涂机器人进行离线编程的必要条件。而工件的造型及数据的获取方法是,将工件的设计阶段与加工制造阶段集成起来,从工件设计阶段直接获取其CAD数据,再根据所获取的CAD数据进行路径规划。然后再使用使用三维激光扫描仪进行扫描,获取工件实物表面的数据,形成点云,再通过三维重构,获取工件的CAD实物数据。使用机械式探针沿工件表面滑动,以获得工件表面数据,再对工件表面数据进行B样条拟合,最终重构出工件的三维模型。
2、喷涂路径规划:路径规划是自动化喷涂机器人离线编程的另一项关键技术。因为喷涂机器人路径规划的好坏,直接关系到喷涂作业的效率以及工件表面的涂层是否均匀,对喷涂工件的质量的影响巨大。而自动化喷涂机器人的路径规划设计则需要将获取到的工件CAD数据转换成STL文件,利用快速成形的切片技术将工件的三维模型进行分层,将各层的点数据进行矢量扩展,然后会得到一系列有方向的点系,按照一定的排列顺序形成喷涂机器人的喷涂轨迹。最后再根据喷枪在工件表面的涂层累积速率数学模型,构建工件曲面上任意一点的涂层厚度数学表达式,用于优化的方法,在曲面的函数空间内寻求一条合适路径的函数表达式,由此得出喷涂的轨迹路径。
3、喷涂精度与标定:影响自动化喷涂机器人的精度与标定有多方面的原因,大体上可分为静态因素与动态因素。其中静态因素主要包括制造、装配时所带来的机器人本体机械结构上的误差,以及由外界温度的改变和长期的磨损而引起的机械部件的尺寸变化,由此造成机器人位姿的误差。而动态因素主要是由外力所引起的机械部件本身的弹性变形所带来的自动化喷涂机器人运动误差。所以要解决以上问题所带来的的误差就需要在使用前对机器人进行标定,建立机器人的参照模型,目前用于机器人标定的技术有基于三坐标测量仪的标定、基于激光跟踪仪的机器人标定以及基于CCD的机器人标定。根据机器人实际运行时的位姿与参照模型间的误差,建立机器人补偿机制,以进一步提高机器人喷涂作业的精度。
http://www.szjuhaozn.com
免责声明:本文所有内容并不反映任何第一枪网意见及观点,亦不代表本站赞同其观点和对其真实性负责,也不构成任何其他建议,第一枪网概不负责,亦不负任何法律责任。请读者仅作参考,并请自行核实相关内容。如有问题请联系media@d17.cc
最新资讯
-
 自动喷涂线涂层杂质的原因及解决方法
自动喷涂线涂层杂质的原因及解决方法在使用自动喷涂线过程中由于各种原因,会使工件涂层出现各种各样的问题。今天我们就来谈一谈工件涂层杂质缺陷问题的产生原因及解决方法。我们常见的杂质主要来源于喷涂环境的粉尘颗粒,及以下几种原因所引起的杂质问题。
-
 悬挂式自动喷漆线作业注意事项
悬挂式自动喷漆线作业注意事项为工件喷涂的生产质量,所以悬挂式自动喷漆线在喷涂生产做业时需要注意以下事项:
-
 定制自动化喷涂机器人生产流程
定制自动化喷涂机器人生产流程近几年随着国内喷涂技术的迅速发展,自动化喷涂机器人得到了广泛的应用,下面我就简单介绍一下喷涂机器人技术的实现方法。
-
六轴往复喷涂机的喷涂方式与特点
随着喷涂行业的快速发展和涂料的不断增加,往复喷涂机的喷涂方法也越来越多,可喷涂的产品种类也越来越多,而往复喷涂机从喷涂方式上主要可以分为:空气喷涂法、高压无气喷涂法、静电喷涂法。
-

-
 六轴往复喷涂机操作安全
六轴往复喷涂机操作安全六轴往复喷涂机的操作规范主要有:防火、自动喷涂线的操作、和化学品及涂料的使用安全三个方面。
